# Configurazione Base e Rover
## Configurazione della base e del rover
Ottieni le schede pratiche sul tuo smartphone per lavorare sul campo
[Scarica \[PDF, 6,3 MB\]](https://files.emlid.com/docs/how-to-cards/reachrs2/base-rover-setup.pdf)
Questa guida mostra come configurare due unità Reach RS2/RS2+ come rover e base e come farle funzionare tramite radio LoRa in modalità RTK.
### Rinomina [i dispositivi](https://docs.emlid.com/reachrs2/rtk-quickstart/base-rover-setup/#rename-reach-devices)
Di default, ogni Reach RS2/RS2+ ha lo stesso nome e la prima cosa che devi fare è rinominarli, così è più facile distinguere tra la base e il rover sul campo. Per rinominare le unità, segui i passaggi sottostanti:
1. Connettiti al Reach RS2/RS2+ che vuoi usare come base.
COME DEFINIRE REACH RS2/RS2+?
Quando ti connetti al tuo Reach, tutti i LED lampeggeranno simultaneamente. Se hai bisogno di far lampeggiare i LED durante un sondaggio, tocca la cella con il nome del tuo ricevitore nella schermata *Receivers* e accedi al pulsante *Flash LEDs .*
2. Vai su *Impostazioni* e tocca *Informazioni sul ricevitore* .
3. In *Nome ricevitore e hotspot* , modifica il nome del tuo Reach in **reach-base** .
NOTA
Il nome immesso verrà utilizzato anche come etichetta di rete Wi-Fi quando Reach è in modalità hotspot.
4. Premere *Salva* .
MANCIA
Utilizzare l'adesivo speciale presente nella confezione per contrassegnare l'unità.
5. Fai lo stesso con il secondo Reach RS2/RS2+. Tuttavia, usa **reach-rover** name invece di **reach-base** .
### Imposta la tua [base](https://docs.emlid.com/reachrs2/rtk-quickstart/base-rover-setup/#set-up-your-base)
Ora devi configurare le impostazioni RTK e la comunicazione tramite radio LoRa tra la base e il rover. Iniziamo dalla base, segui i passaggi sottostanti:
1. Collegare all'unità base.
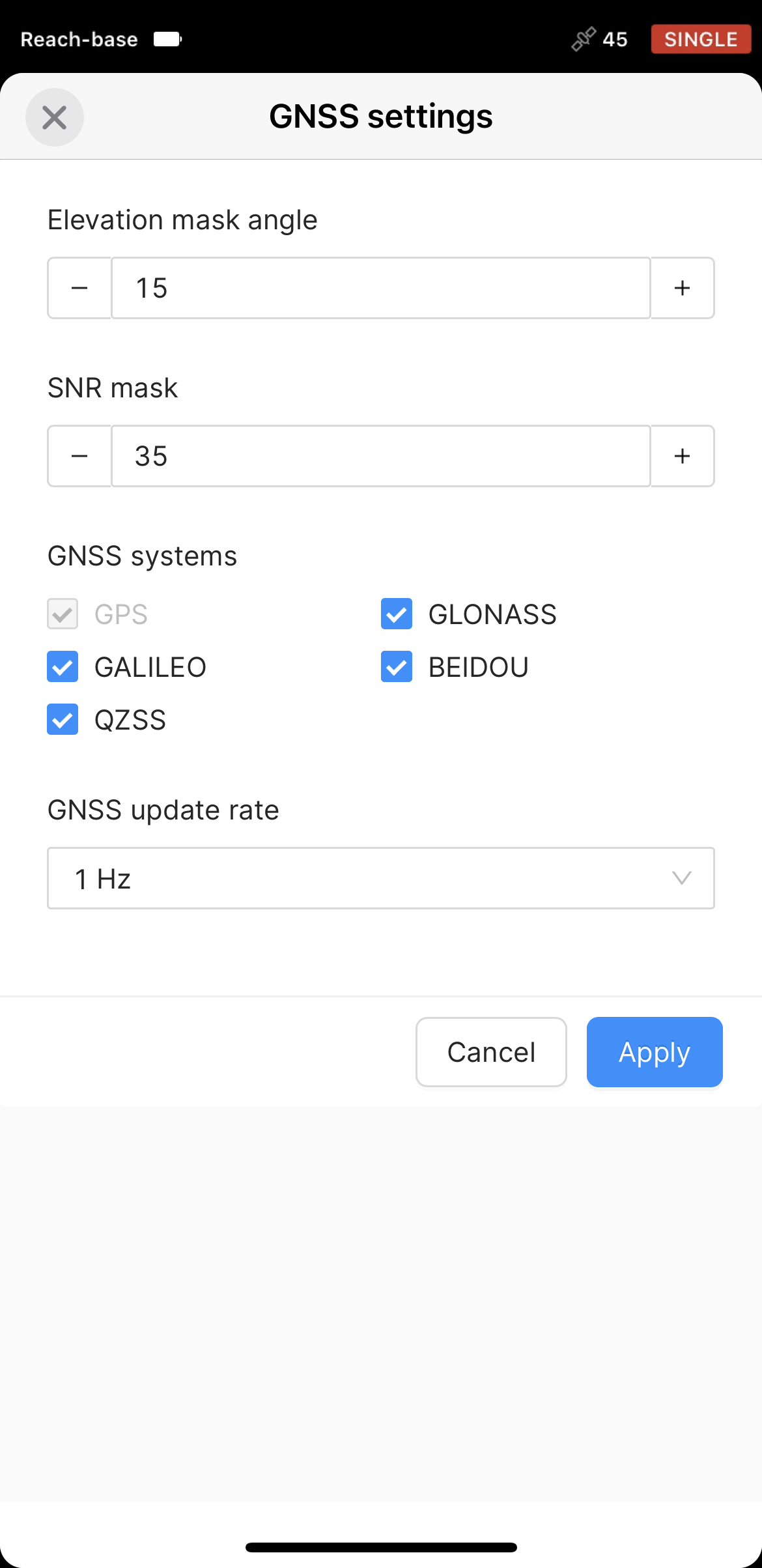
2. Vai su *Impostazioni* e tocca *Impostazioni GNSS* . Seleziona ciascuno dei sistemi satellitari.
3. Impostare la frequenza di aggiornamento GNSS a 1 Hz.
4. Ritorna alla schermata *Receivers* . Nella schermata *Base settings* , vai a *RTCM3 messages* .
5. Selezionare per emettere messaggi RTCM3 come segue:
* *Coordinate della stazione ARP* a **0,1 Hz**
* Altri messaggi MSM4 a **0,5 Hz**
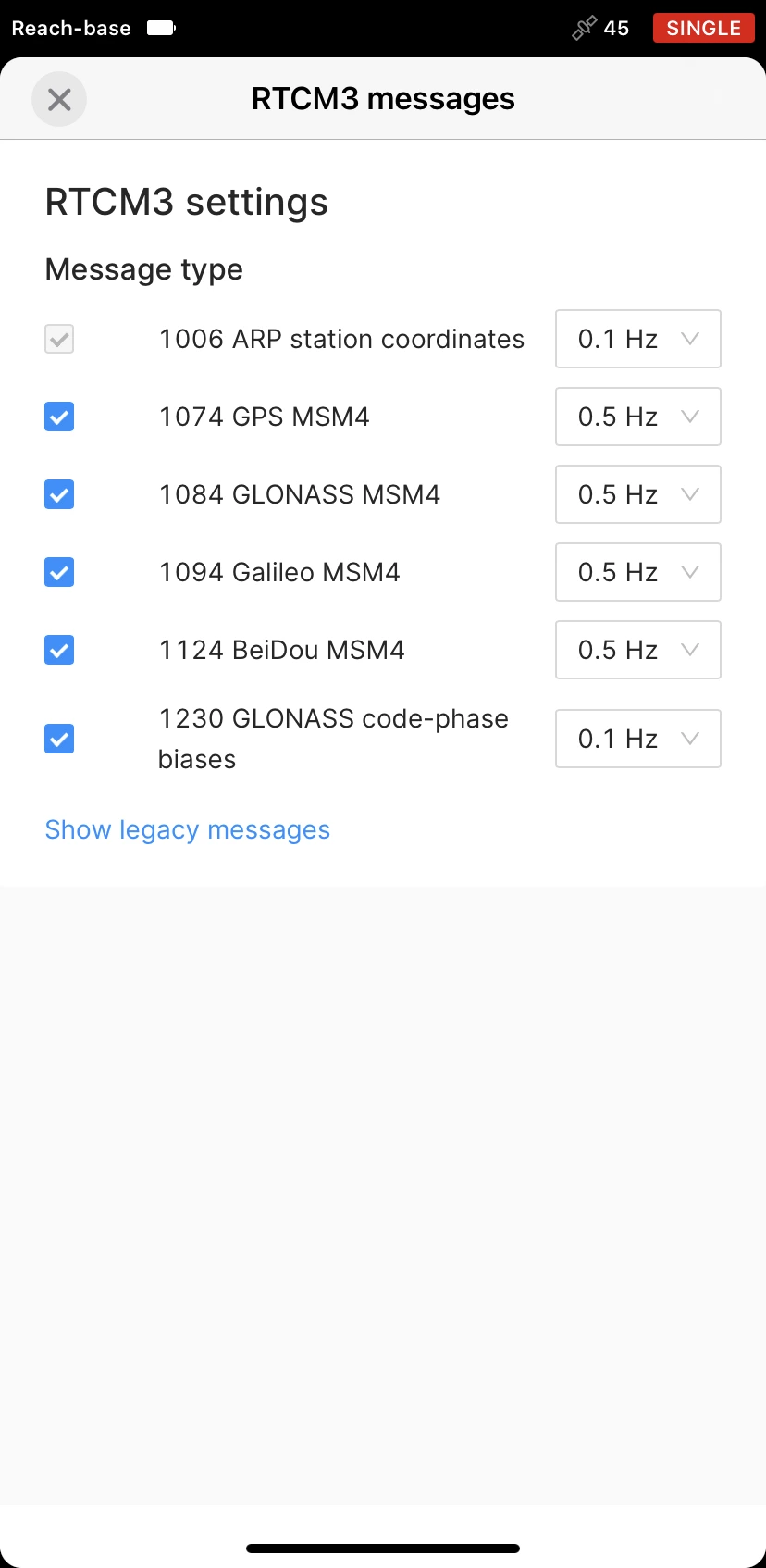
6. Tocca *Applica* .
7. Ritorna alla schermata *Receivers* . Nella schermata *Base output* , seleziona *LoRa* .
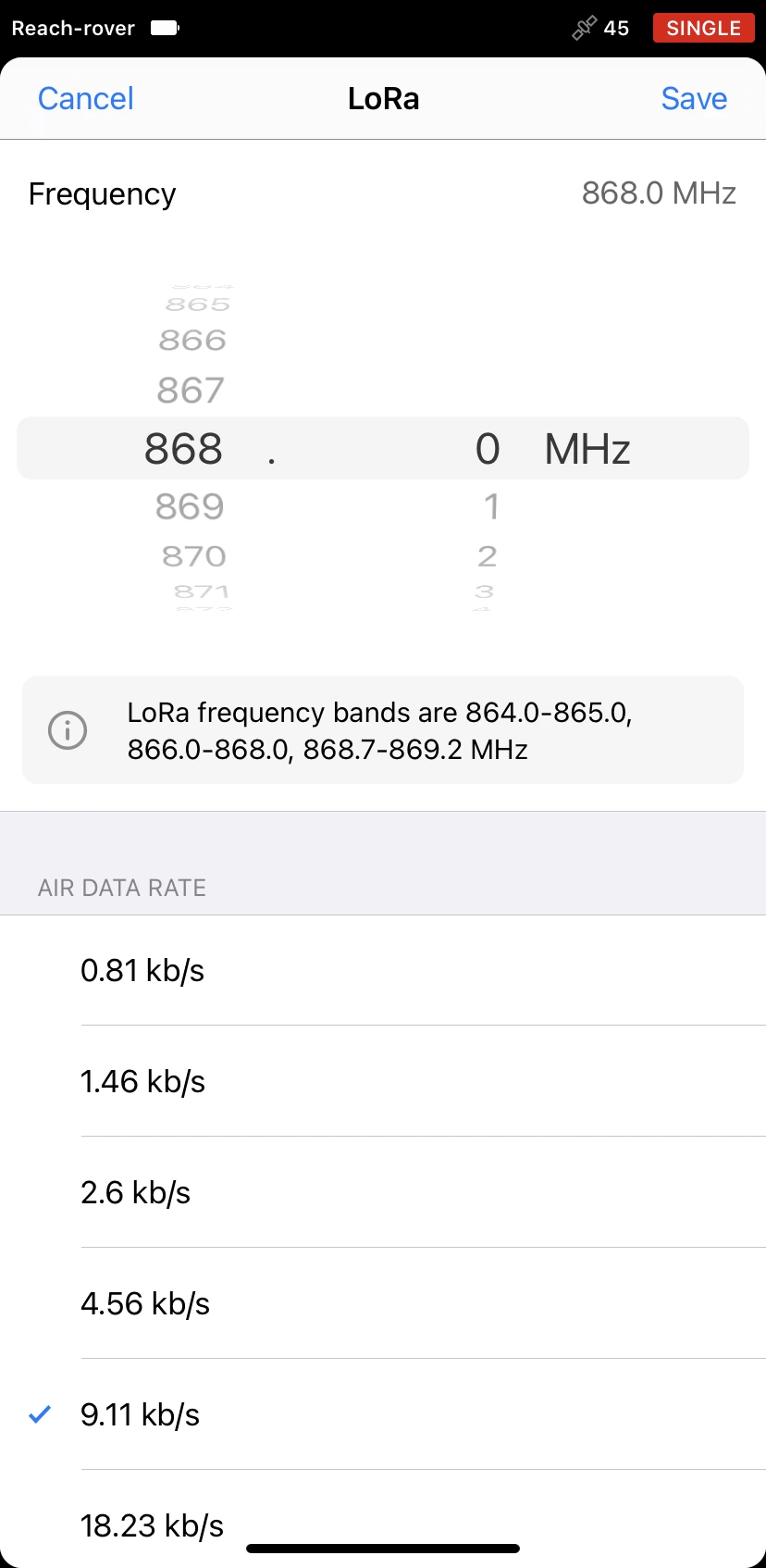
8. Tocca il pulsante *Modifica* nella cella *LoRa* . Seleziona la frequenza e imposta la potenza di uscita a **20 dBm** .
ATTENZIONE
Assicurati di selezionare la frequenza e la potenza di uscita appropriate in base alle normative locali. In caso di restrizioni, le limitazioni della banda di frequenza verranno applicate automaticamente.
9. Imposta la velocità dei dati aerei a **9,11 kb/s** . Tocca *Salva* .
Ora puoi procedere alla configurazione dell'unità rover.
### Configura il tuo [rover](https://docs.emlid.com/reachrs2/rtk-quickstart/base-rover-setup/#set-up-your-rover)
Per completare la configurazione delle impostazioni RTK e la comunicazione tramite radio LoRa tra la base e il rover, devi impostare il tuo rover. Segui i passaggi sottostanti:
1. Connettersi all'unità rover.
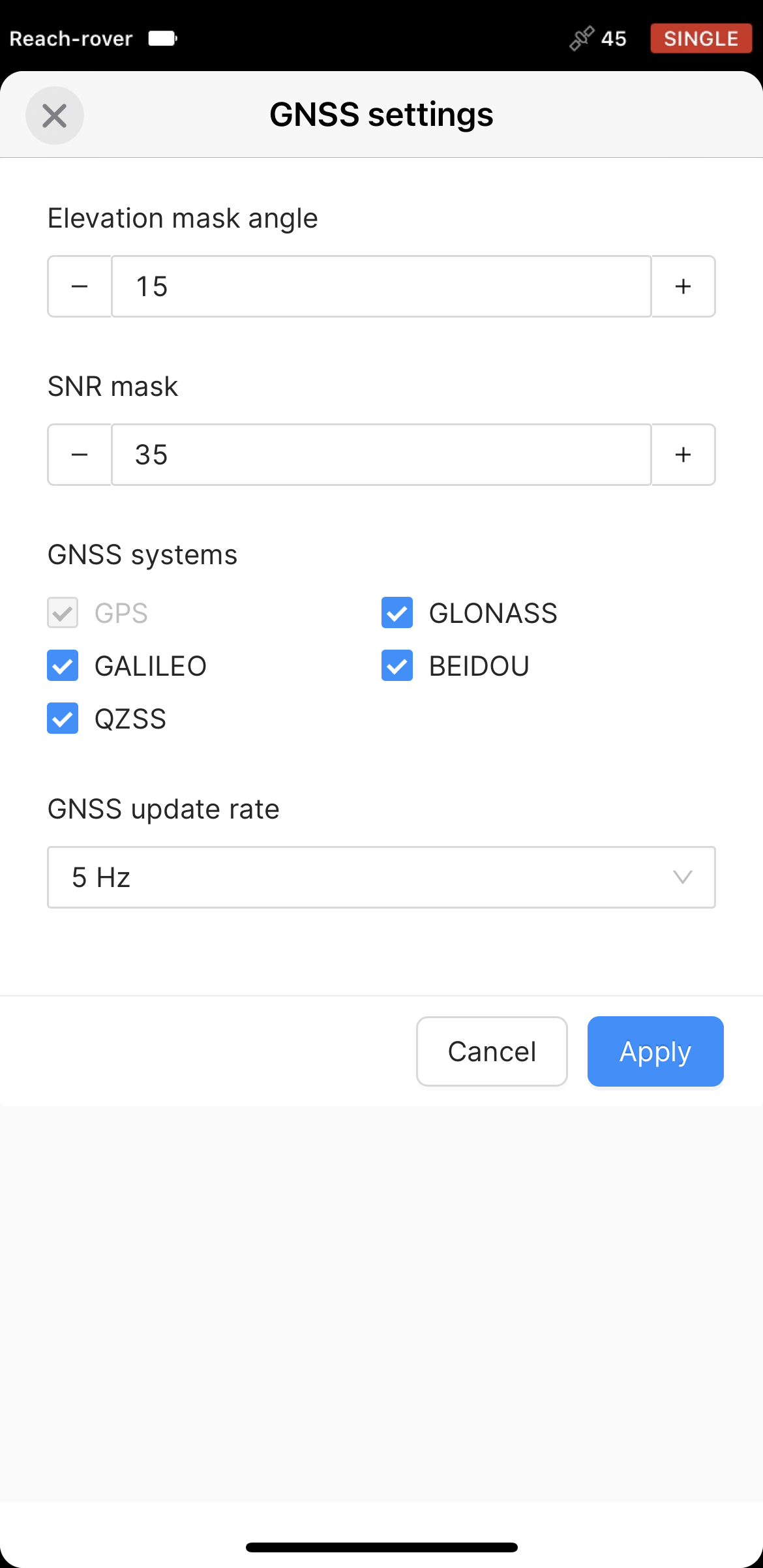
2. Vai su *Impostazioni* e tocca *Impostazioni GNSS* .
3. Seleziona gli stessi sistemi GNSS della base e imposta la frequenza di aggiornamento GNSS a 5 Hz. Applica le modifiche.
4. Per configurare la radio LoRa sull'unità rover per ricevere le correzioni, tornare alla schermata *Ricevitori* e toccare *Input correzione* .
5. Seleziona *LoRa* . Imposta la stessa frequenza e velocità dati aerea della base. Tocca *Salva* .
MANCIA
Per assicurarti che le correzioni passino dalla base al rover, puoi mettere entrambi i ricevitori vicino alla finestra per qualche minuto per fornire la visibilità del cielo. Dopodiché, apri Emlid Flow, connettiti al rover e vai alla schermata *Status* . Scorri verso il basso fino alla sezione *Corrections* e assicurati che il tuo rover stia ricevendo le correzioni.
### Posiziona [unità](https://docs.emlid.com/reachrs2/rtk-quickstart/base-rover-setup/#place-reach-rs2rs2-units)
Una volta configurate le impostazioni sia sulla base che sul rover, sei pronto per uscire per posizionare la base e completare il processo di configurazione. Per i lavori sul campo, avrai bisogno di un treppiede e di un palo di rilevamento. Per posizionare le unità, segui i passaggi sottostanti:
NOTA
Prima di posizionare la base, assicurati di essere in un'area aperta con una visuale libera sul cielo. Ciò garantirà una buona ricezione del segnale e un discreto numero di satelliti disponibili.
1. Montare la base Reach RS2/RS2+.
2. Livellare accuratamente il treppiede.
3. Posizionare il rover sul palo.
4. Collegare le antenne LoRa a entrambe le unità.
5. Accendere i ricevitori.
MANCIA
Per saperne di più sul posizionamento, consulta la guida [al posizionamento](https://docs.emlid.com/reachrs2/before-you-start/placement/) .
Dopo aver posizionato la base sul treppiede, puoi completarne l'installazione:
NOTA
In questa guida, utilizzeremo il metodo di installazione della base SINGOLA media. Per saperne di più sui metodi di installazione della base, consulta la guida [Posizionamento della base](https://docs.emlid.com/reachrs2/rtk-quickstart/rtk-quickstart/placing-the-base.mdx/) .
1. Connettersi alla base.
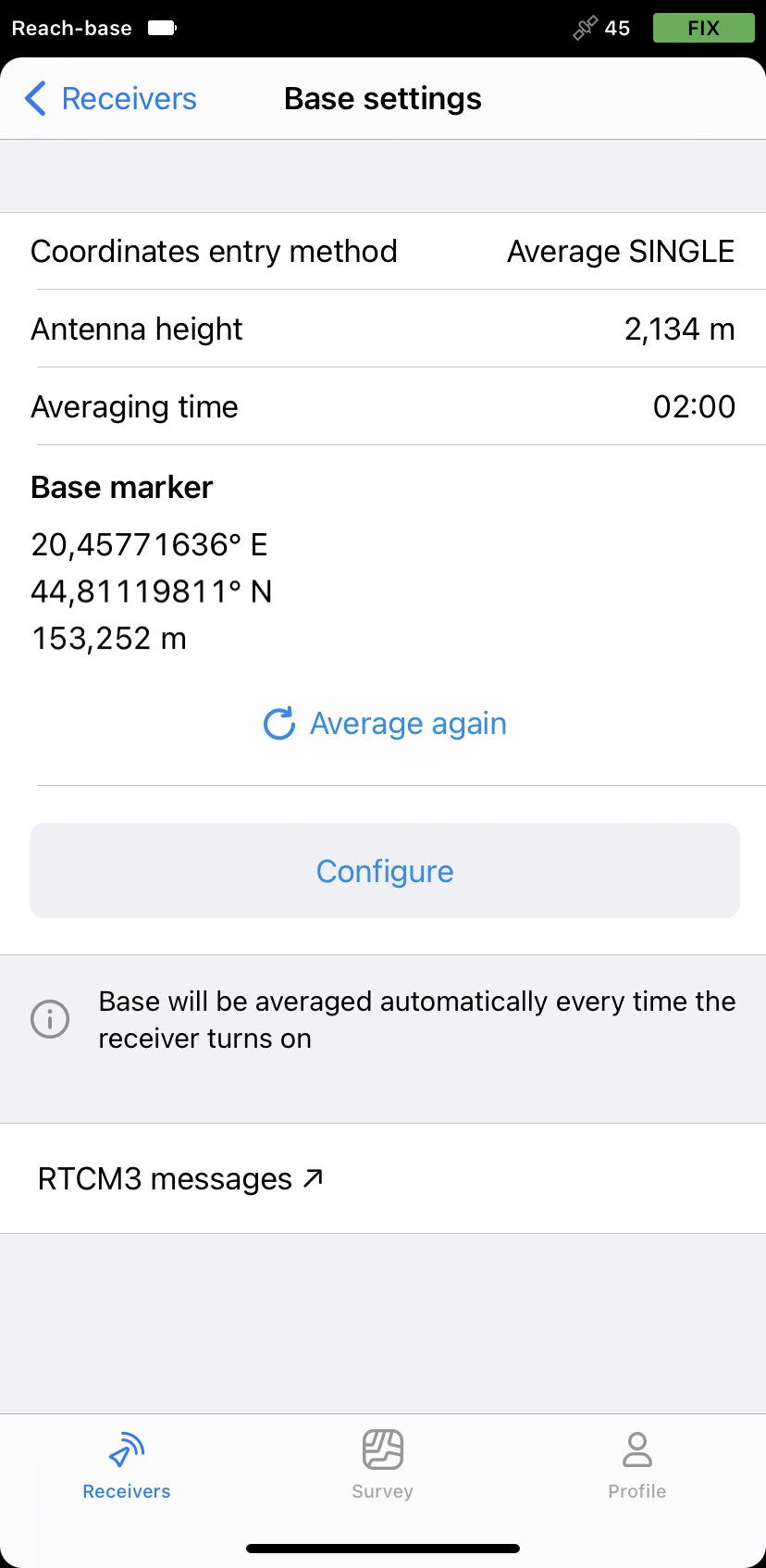
2. Nella schermata *Ricevitori* , toccare *Impostazioni base* .
3. Per configurare le impostazioni di base, toccare il pulsante *Configura .*
4. Seleziona *Average SINGLE* come metodo di immissione delle coordinate di base e imposta il tempo di media. Tocca *Salva* .
ATTENZIONE
Non spostare la base mentre Reach sta accumulando dati.
NOTA
La posizione base viene calcolata automaticamente ogni volta che si accende il ricevitore.
Dopo aver accumulato i dati, vedrai le coordinate medie nella sezione *Base marker* . Ora la tua base è impostata e trasmette le correzioni al rover.
### Visualizza [i risultati](https://docs.emlid.com/reachrs2/rtk-quickstart/base-rover-setup/#view-results)
Una volta completata la configurazione RTK tramite radio LoRa, puoi vedere lo stato attuale della soluzione nell'angolo in alto a destra dell'app Emlid Flow:
* **SINGLE** significa che il rover ha trovato una soluzione basandosi sul proprio ricevitore e le correzioni di base non vengono applicate. La precisione in modalità standalone è solitamente a livello di diversi metri.
* **FLOAT** significa che il rover riceve correzioni dalla base ma non riesce a risolvere tutte le ambiguità e, in questo caso, la precisione è solitamente al livello submetrico.
* **FIX** significa che il rover, utilizzando le correzioni della base, ha risolto le ambiguità nel calcolo della posizione e ha ottenuto la soluzione con una precisione centimetrica.
Dopo un breve periodo di tempo, il rover ottiene una soluzione fissa. In buoni ambienti, ci vorranno alcuni secondi per ottenere una soluzione fissa. In condizioni difficili, potrebbe volerci un po' più di tempo. Una volta che il rover ottiene FIX, sei pronto per il rilevamento.
*Nella schermata Stato* puoi inoltre conoscere lo stato attuale della soluzione e la tua posizione in tempo reale .
MANCIA
Dopo aver imparato come configurare RTK tramite radio LoRa, potrai anche scoprire come [connettere il tuo Reach a Internet](https://docs.emlid.com/reachrs2/rtk-quickstart/connecting-reach-to-the-internet/connecting-to-the-internet/) e [utilizzare il servizio NTRIP](https://docs.emlid.com/reachrs2/rtk-quickstart/ntrip-workflow/) .
---
# Agent Instructions: Querying This Documentation
If you need additional information that is not directly available in this page, you can query the documentation dynamically by asking a question.
Perform an HTTP GET request on the current page URL with the `ask` query parameter:
```
GET https://help.strumentitopografici.it/gps-topografici/emlid-reach-rs2-rs2+/rtk/configurazione-base-e-rover.md?ask=
```
The question should be specific, self-contained, and written in natural language.
The response will contain a direct answer to the question and relevant excerpts and sources from the documentation.
Use this mechanism when the answer is not explicitly present in the current page, you need clarification or additional context, or you want to retrieve related documentation sections.