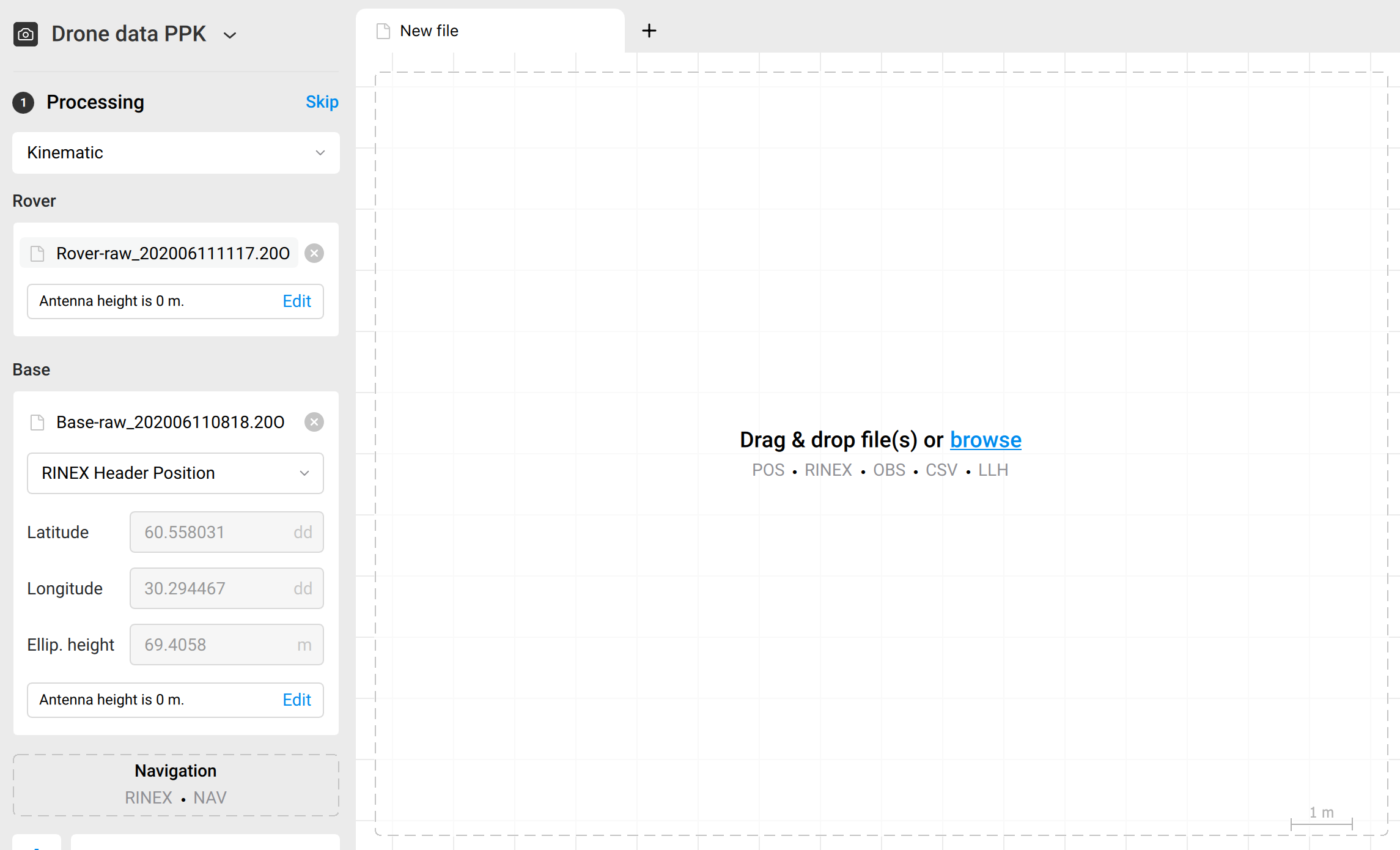
Caricamento del file RINEX da Base in Emlid Studio e impostazione delle coordinate della Base
Caricamento del file RINEX da Base in Emlid Studio e impostazione delle coordinate della Base
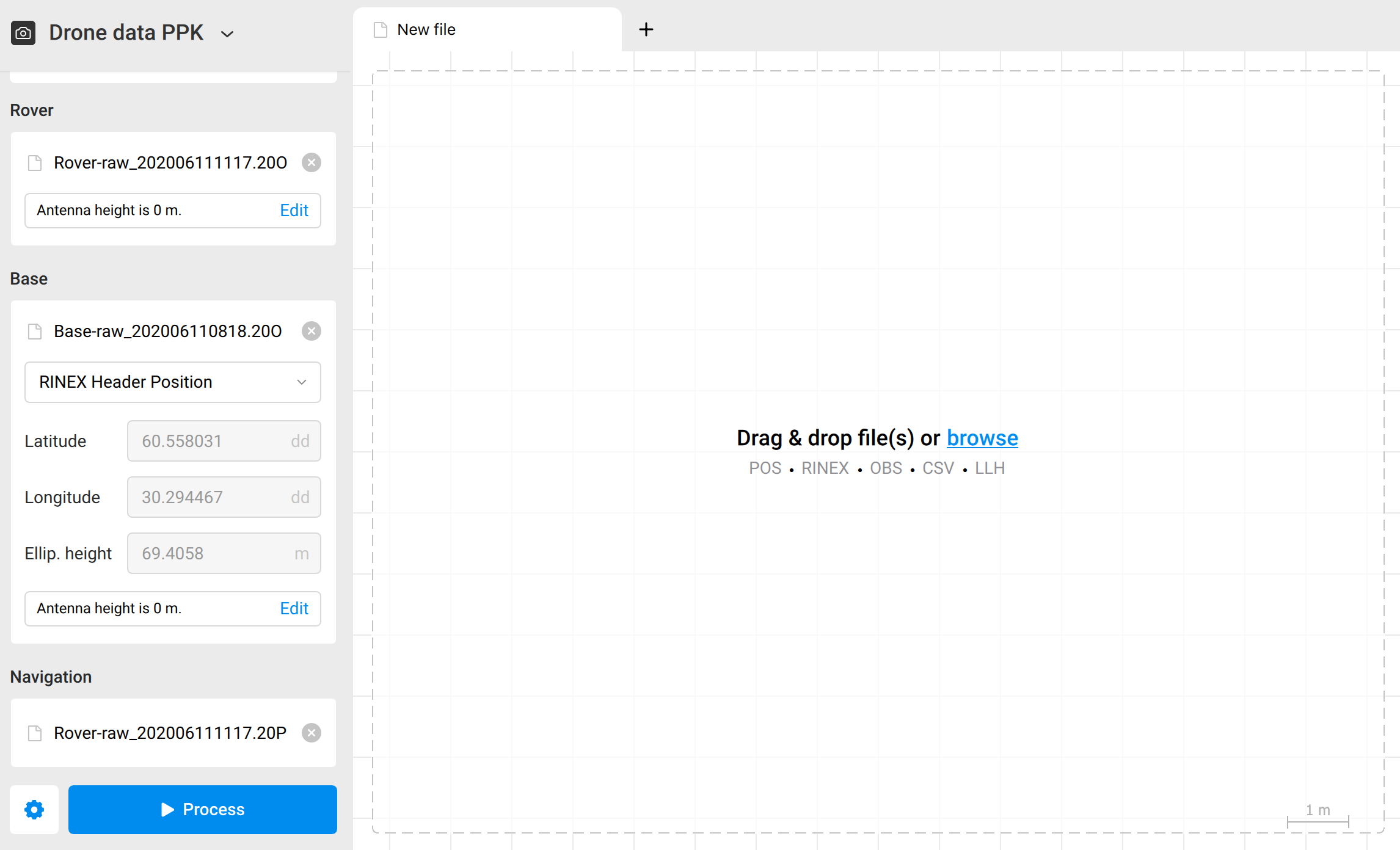
Caricamento del file RINEX dalla Base o dal Rover in Emlid Studio
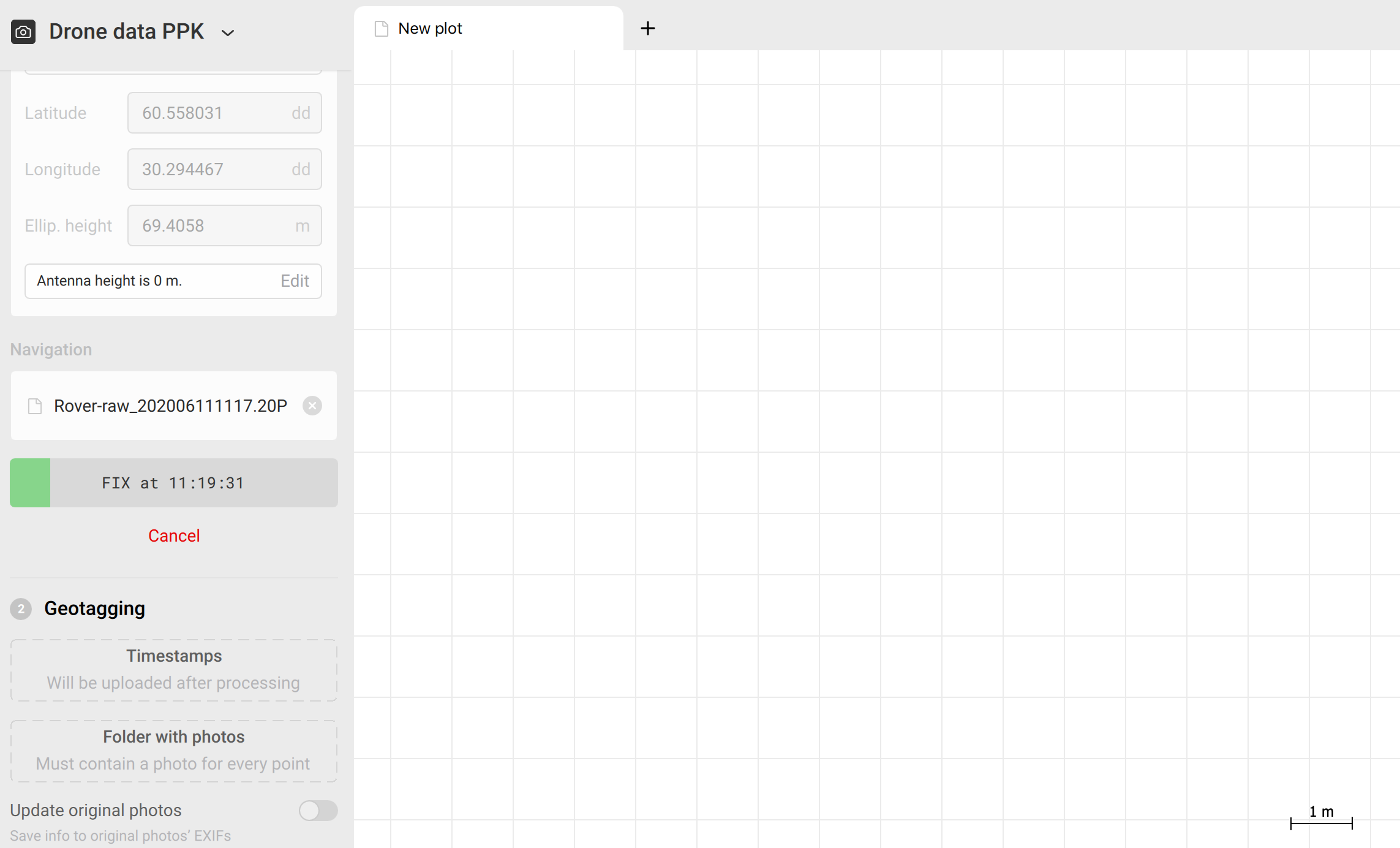
Avanzamento della lettura dei dati caricati su Emlid Studio
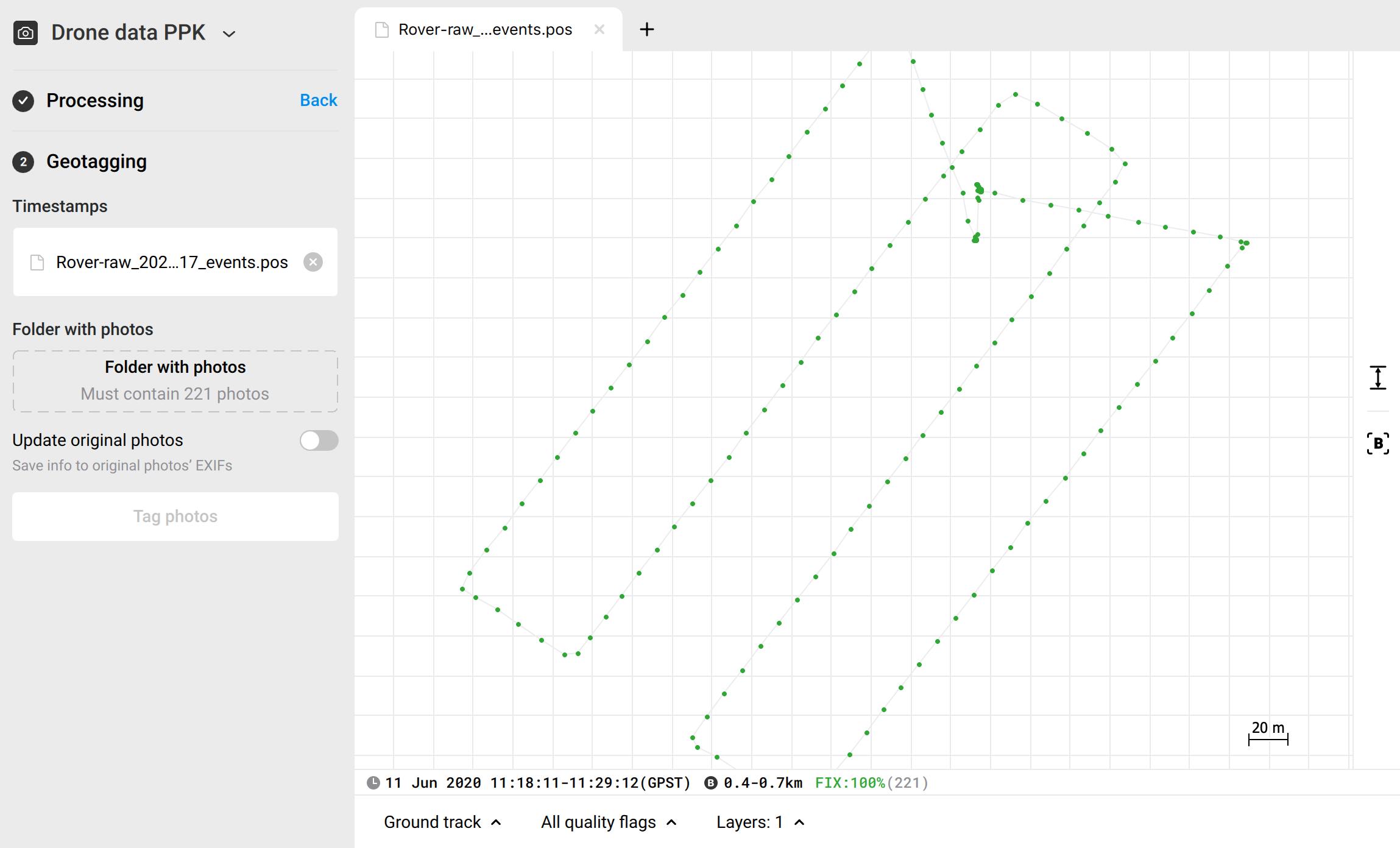
Grafico del file.pos caricato su Emlid Studio
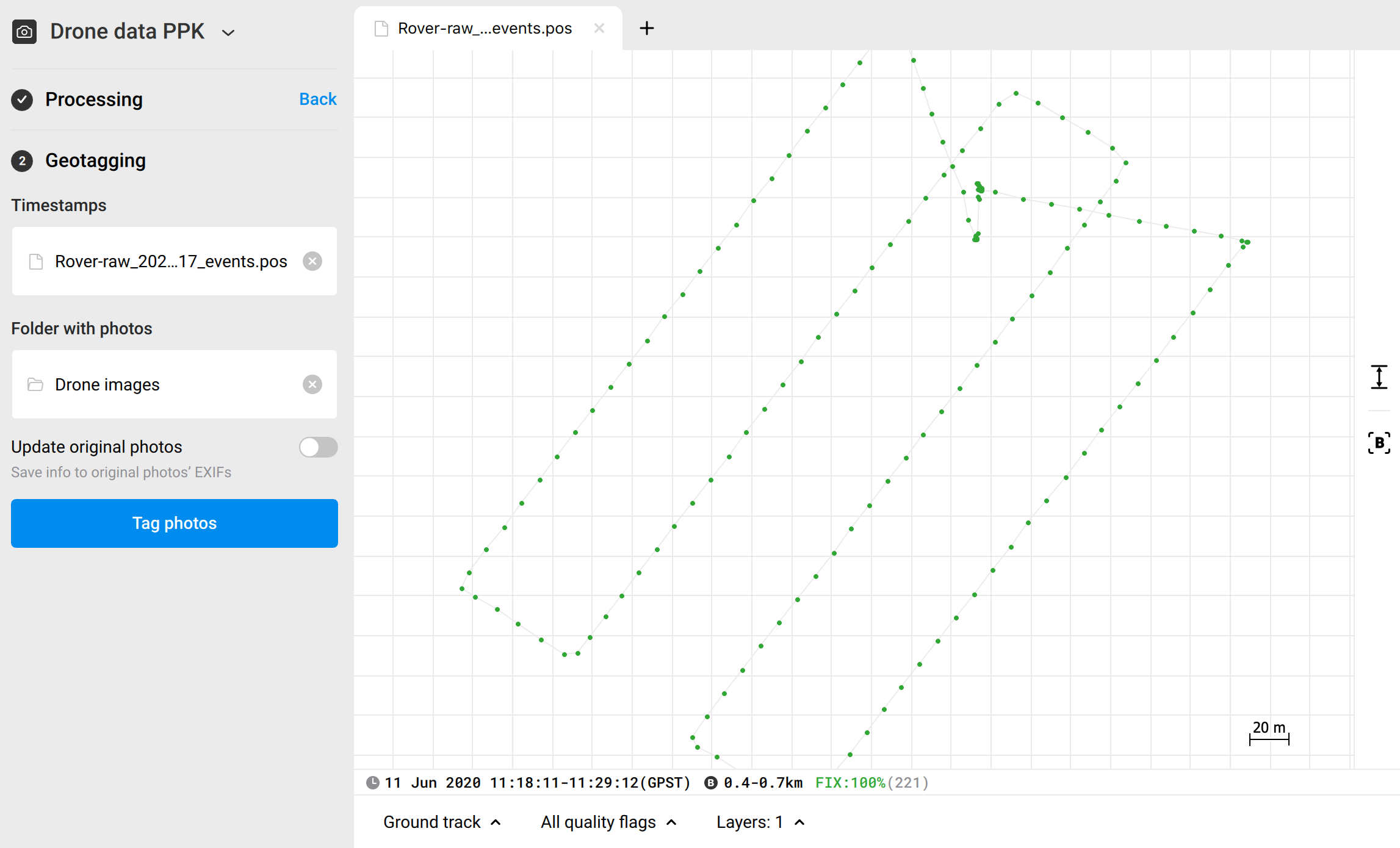
Caricamento delle foto scattate con il drone
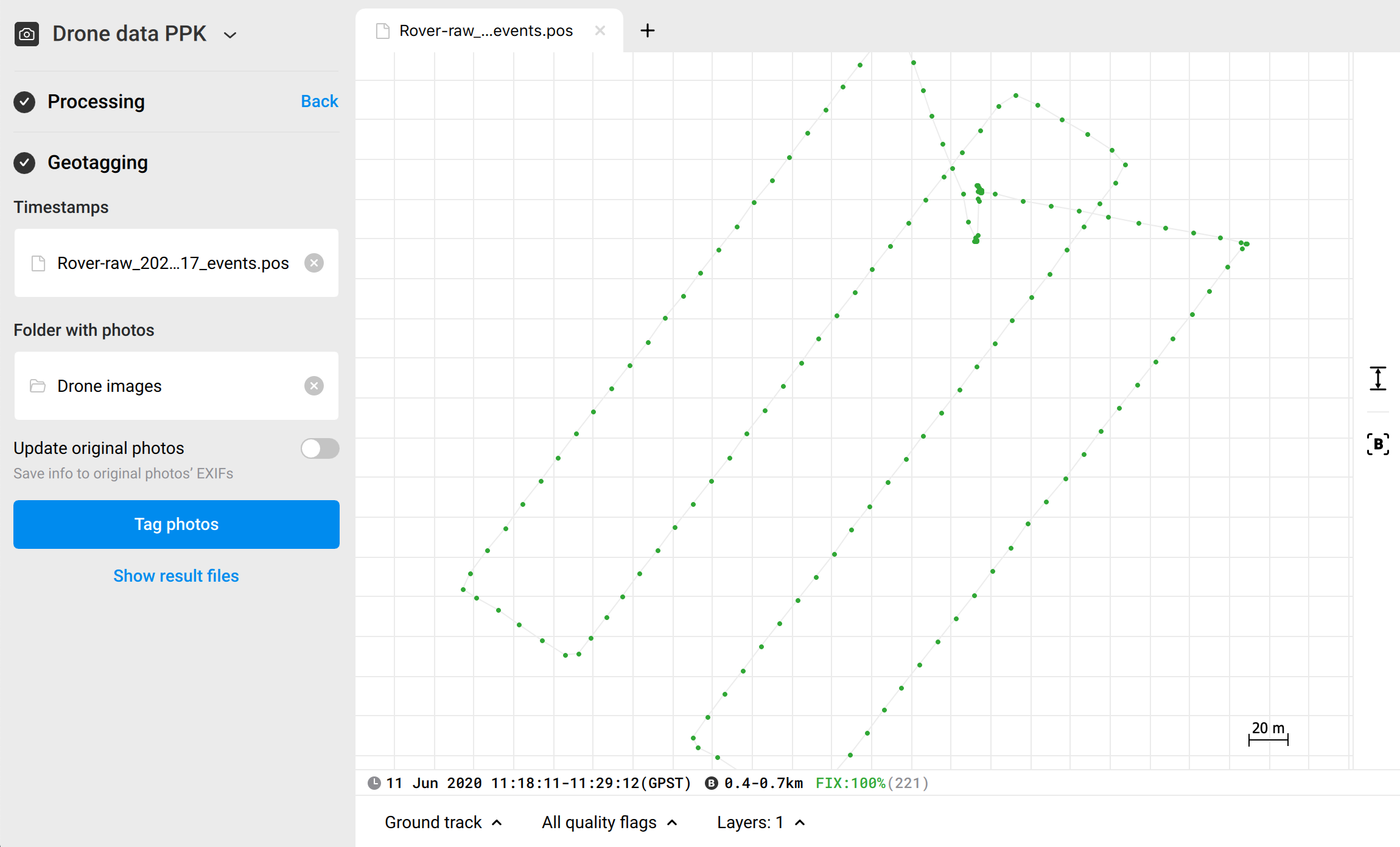
Processo di geotagging delle foto scattate con il drone