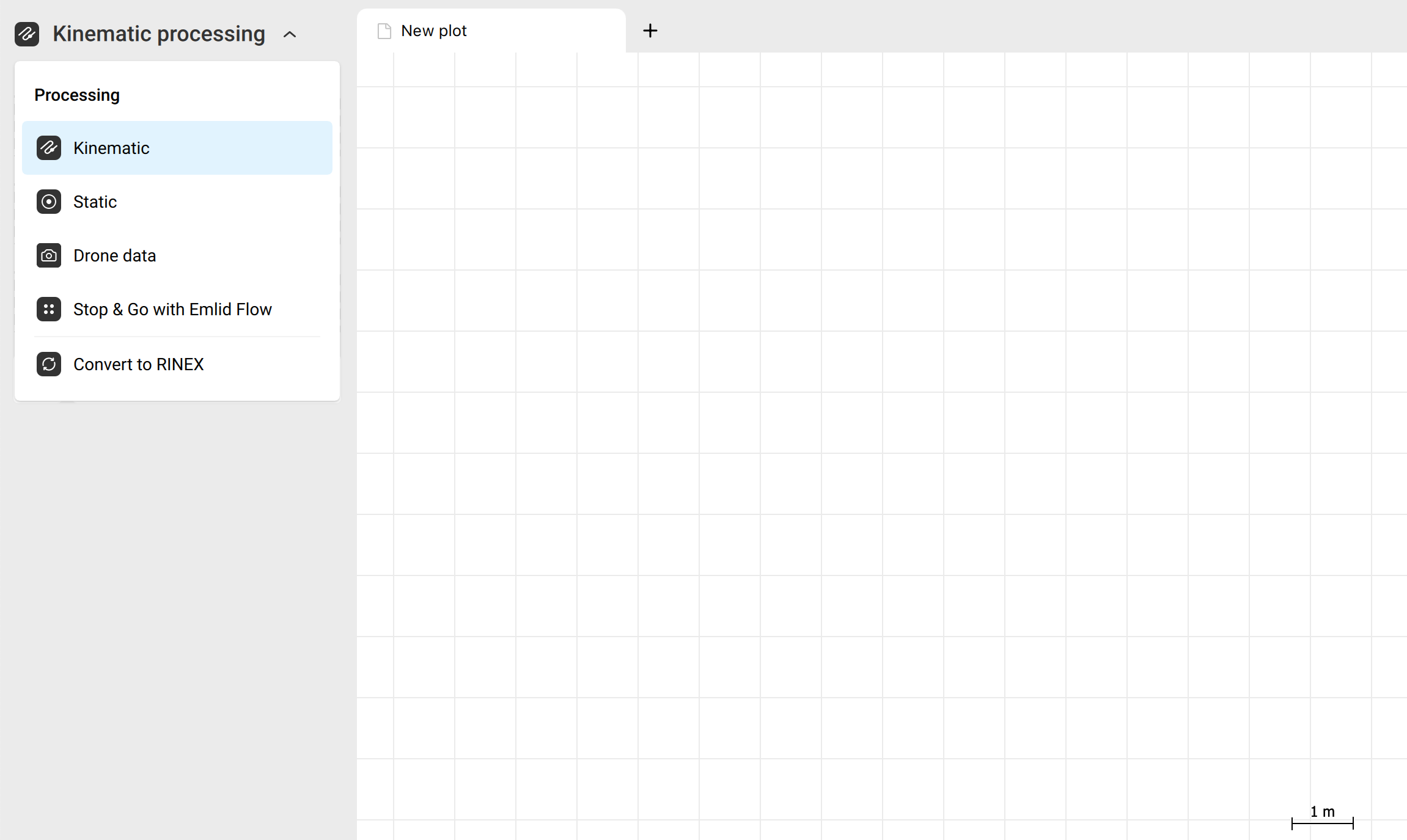
Seleziona il flusso di lavoro nel menù in alto a sinistra
Seleziona il flusso di lavoro nel menù in alto a sinistra
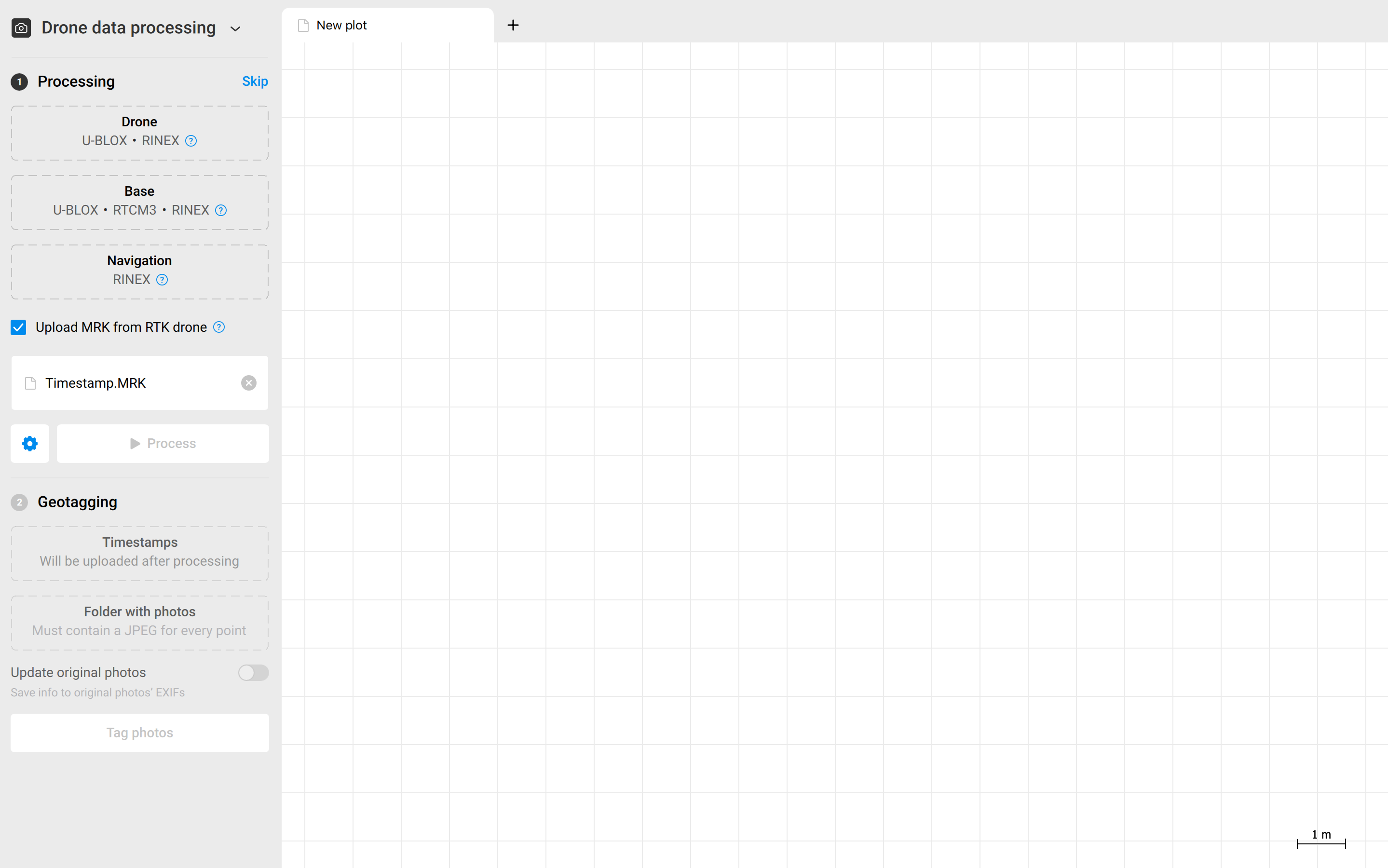
Aggiunta del file.mrk del drone
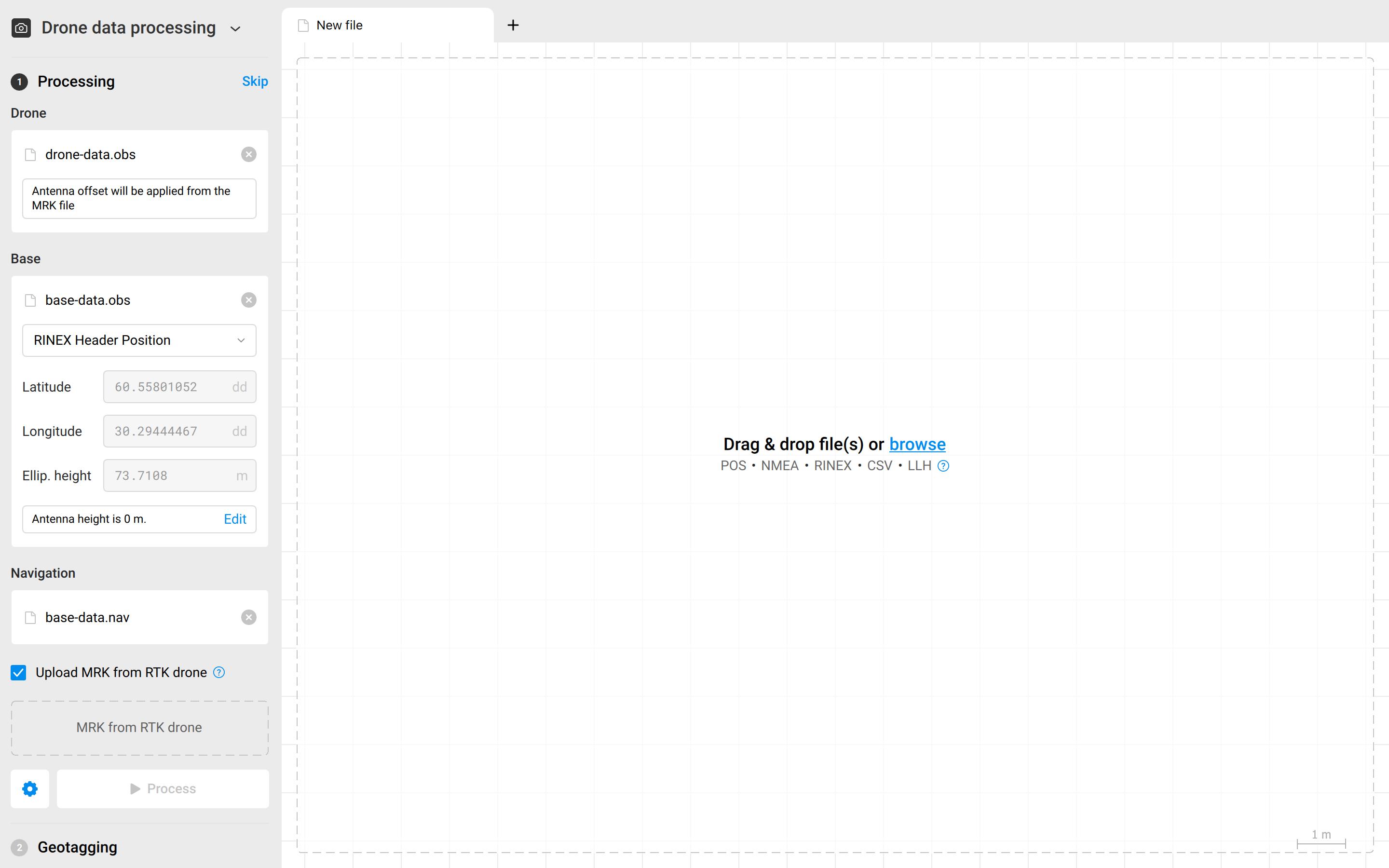
Aggiunta del file di navigaazione RINEX della base
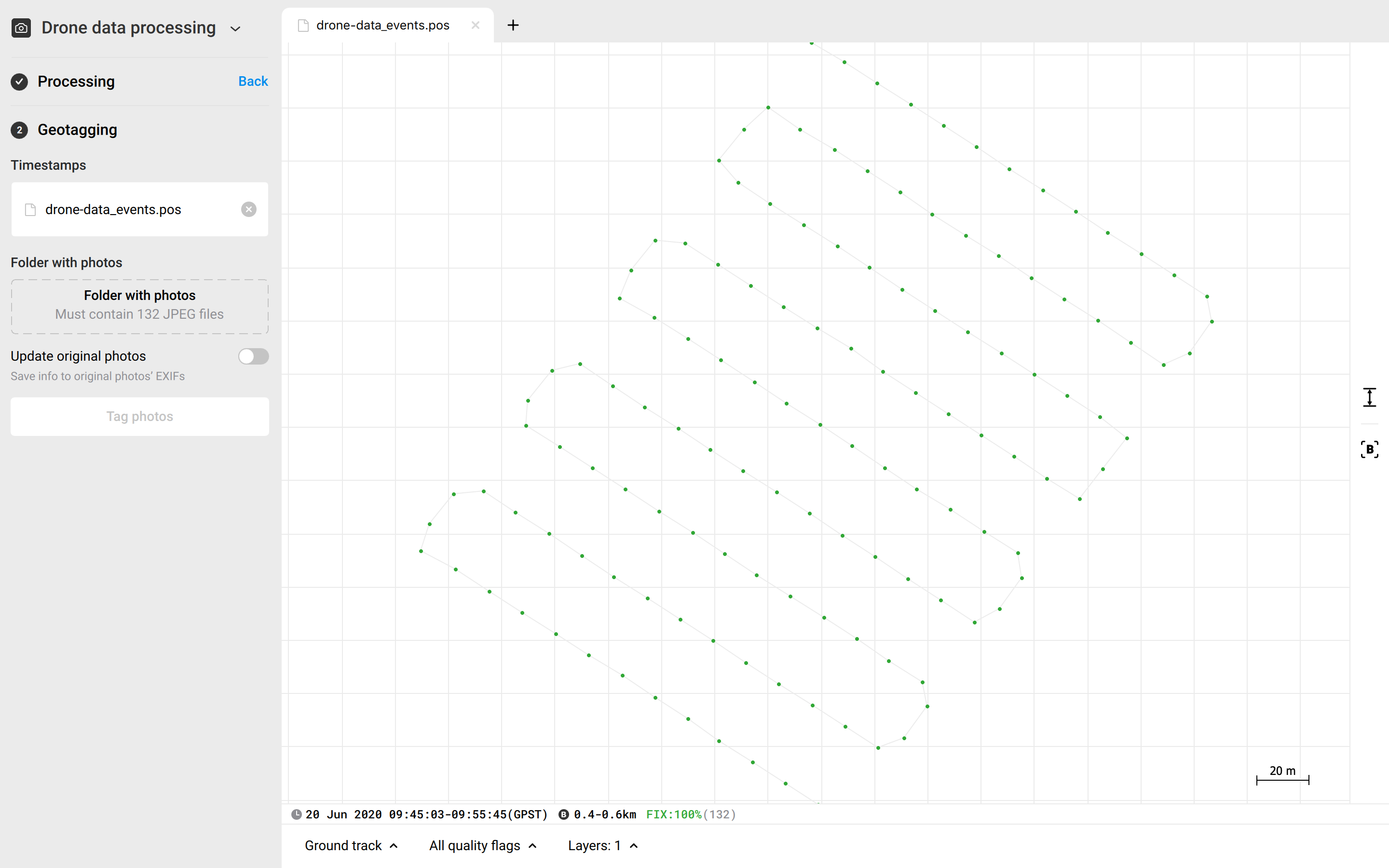
Elaborazione dei dati e visualizzazione sulla trama
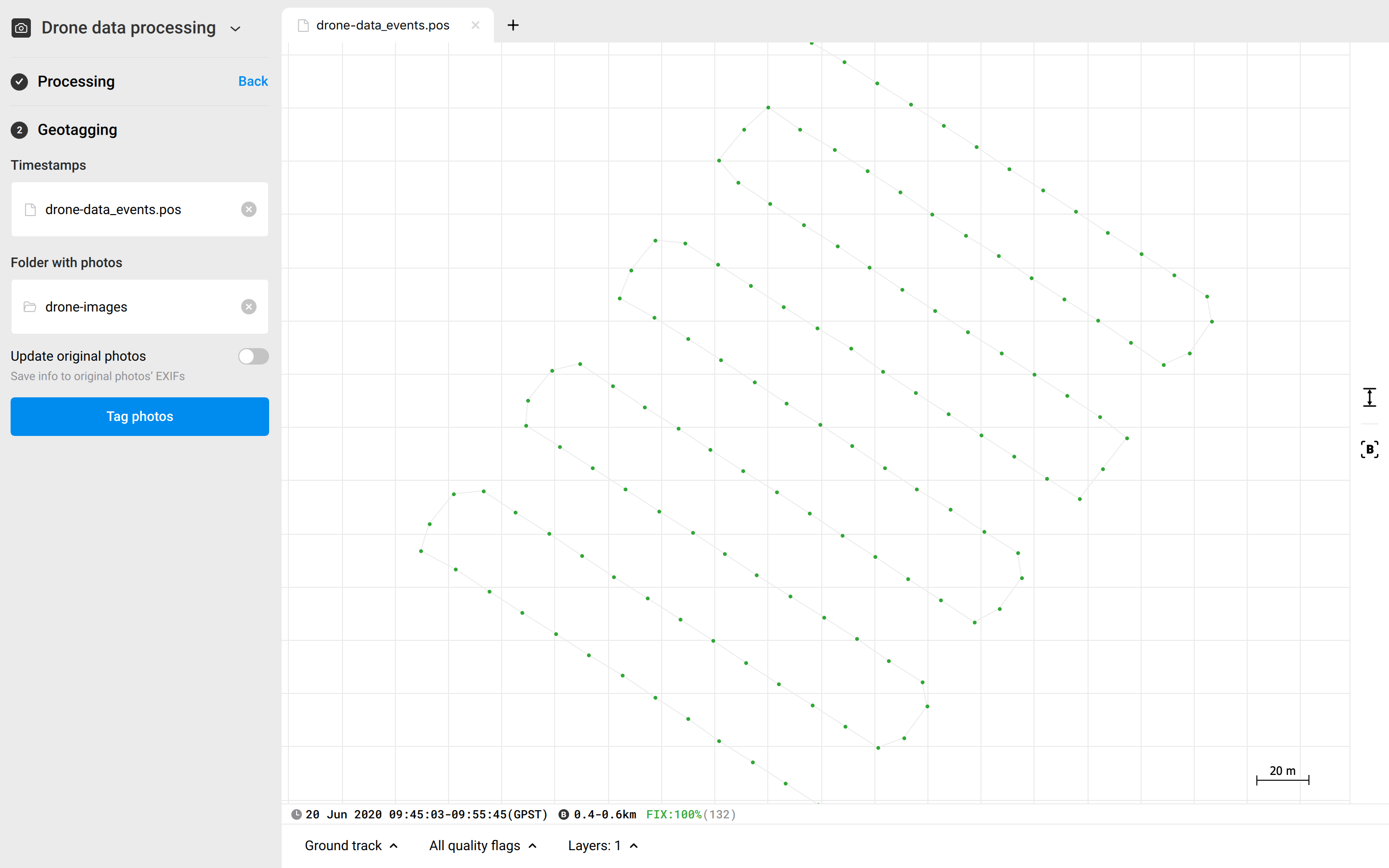
Caricamento delle foto scattate con il drone
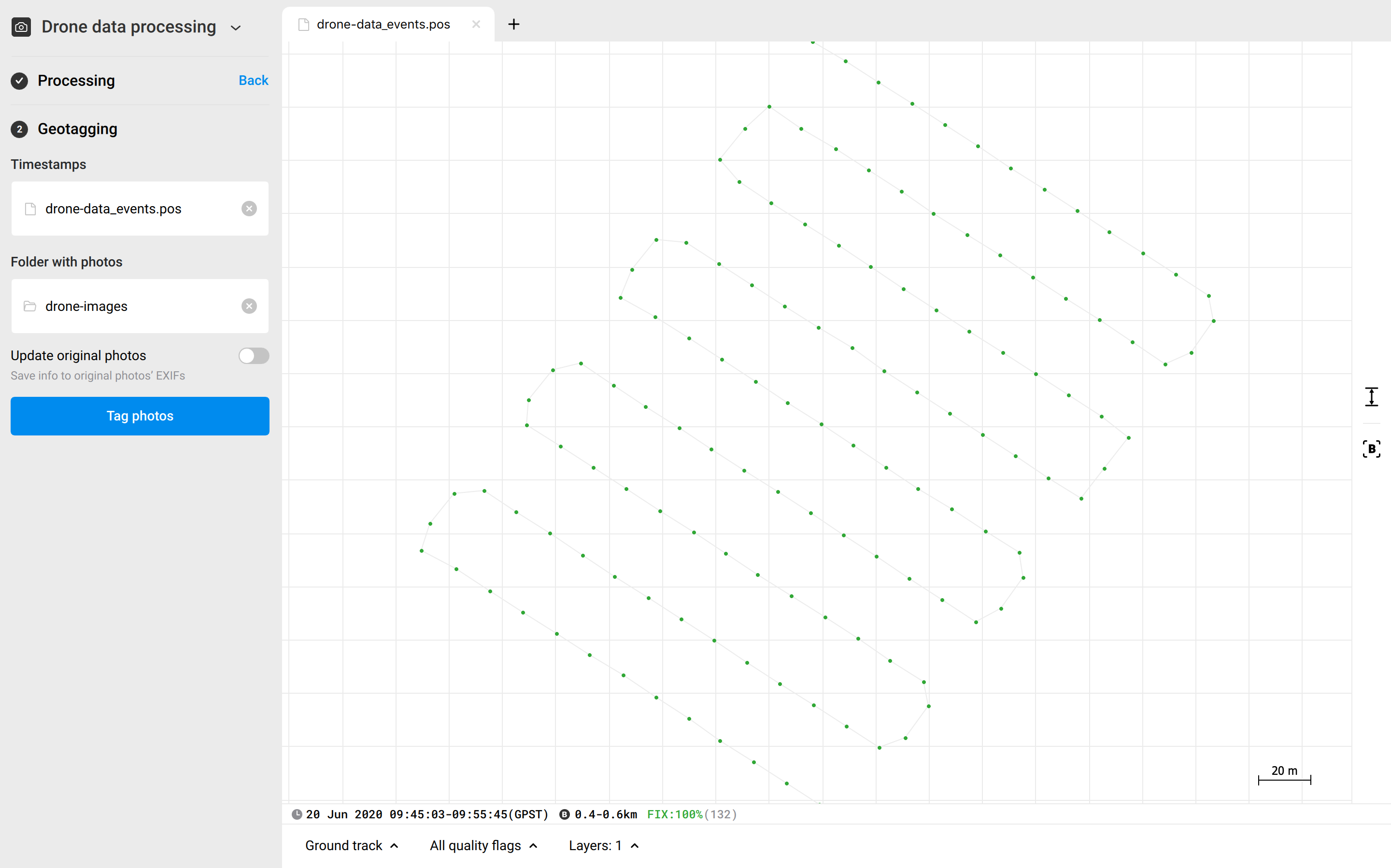
Processo di geotagging delle foto