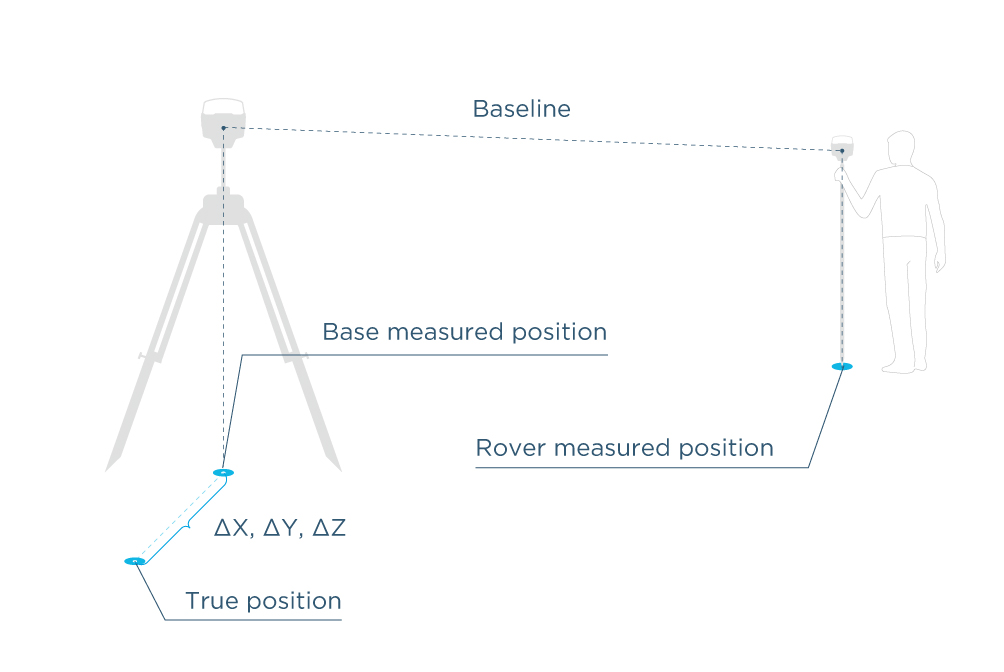
Posizionamento Base/Rover
Posizionamento Base/Rover
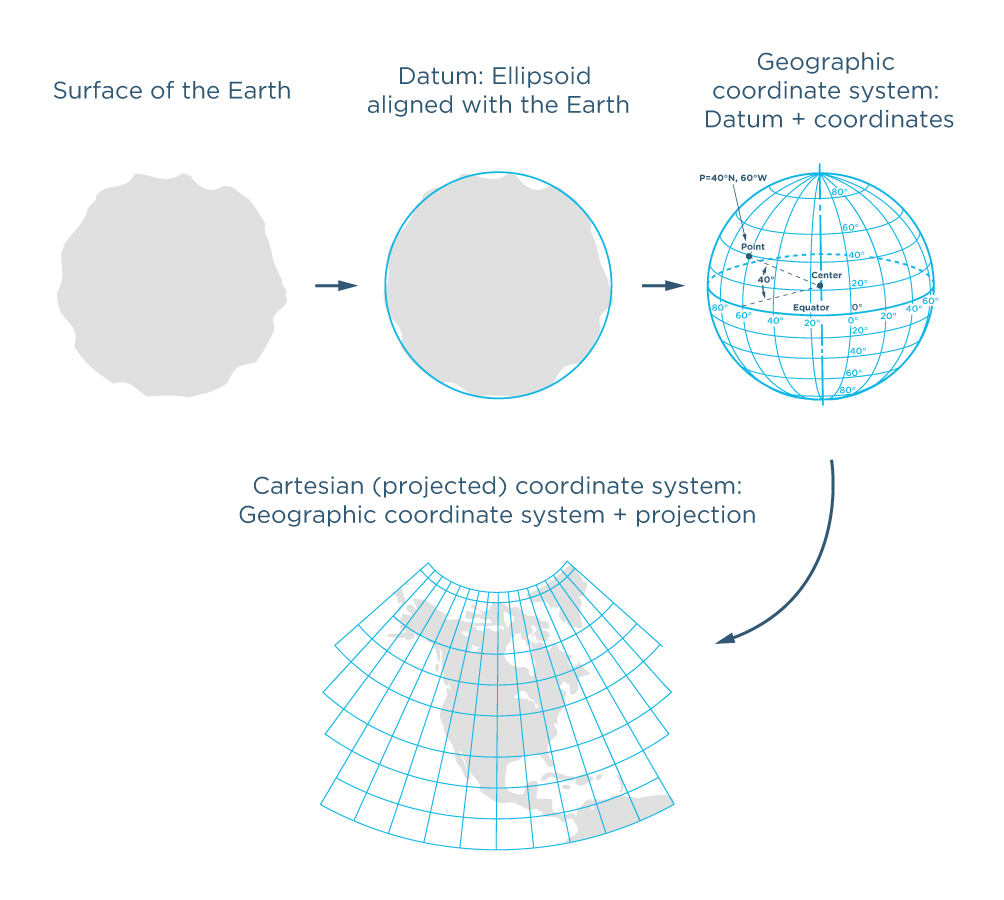
Rappresentazione cartografica appiattita del sistema di coordinate geografiche
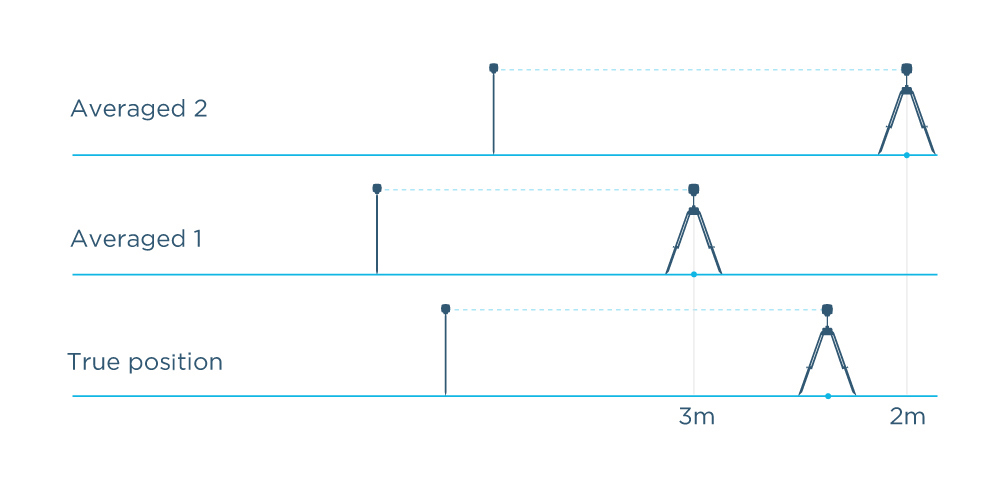
Posizionamento relativo - Precisione delle misurazioni a livello del metro rispetto alla posizione della Base
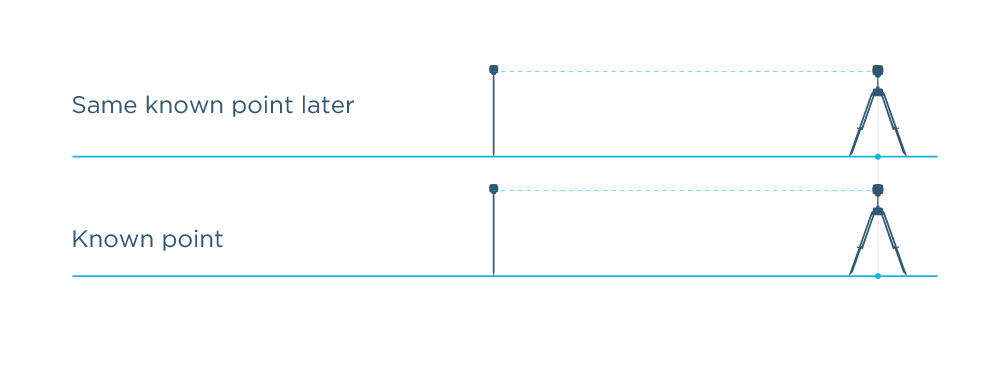
Posizionamento assoluto - Precisione centimetrica del Rover nel sistema di coordinate selezionato